PI Controller in The Simulink Model Assignment Help
Introduction
For any Help with Matlab Assignment/ Matlab Homework or Matlab Project including PI Controller In The Simulink Model, you can submit your Assignment/ Homework or Project by clicking “Upload Your Assignment” button or. Our tutors go through your requirements in information and just afterwards we go back at the earliest. You can likewise go over about your Assignment through our Live Chat. In case you have to set up an Online Matlab Tutoring Session on PI Controller In The Simulink Model, then you can go over about it utilizing our Live Chat. PI Controller in the Simulink Model have 2 tuning requirements to alter. While it makes harder to tune than a P-Only controller, they aren’t as complex as the 3 requirement PID controller.
Necessary action makes it possible for PI Controller in the Simulink Model to obtain rid of cancelled, a substantial powerlessness of a P-only controller. PI controllers provide a balance of complexity and capability that makes them without a doubt the most thoroughly made use of algorithm in treatment control applications. PI Controller in the Simulink Model are incredibly often used in market, particularly when speed of the response is not an issue. Finding style method that result in finest possible operation of PI Controller in the Simulink Model is for this reason of substantial interest. In order for the controllers to work sufficient, controller has to be tuned correctly. Fine-tuning of controllers can be carried out in a variety of techniques, depending upon the qualities of the system and a variety of strategies have in fact been developed in most recent years.
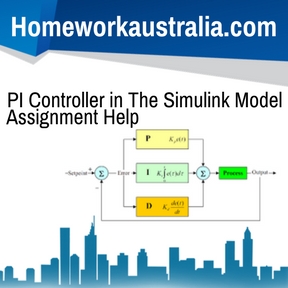
A PI Controller in the Simulink Model is regularly used in engineering control system. PI controller evaluation consists of 2 various constant requirements, Proportional and essential symbolized by P and I. PI Controller in the Simulink Model with different tuning standards was thought of for non direct system. The evaluation is done on the performance analysis based upon peak overshoot and settling time is performed in the software application simulation by using numerous controller tuning methods. PI Controller in the Simulink Model provides the motivation for online tuning, where the focus is on the automated online synthesis and tuning of the basic controller requirements, that is, using the online info, the accepted wise system can continually learn which will make certain that the performance objectives are pleased. The online tuning of a basic controller through a wise approach is amongst the approaches to automate the operator’s task and to obtain the better controller performance over a big operating range.
With numerous motors the Motor Control Wildcard need to work well out-of-the-box. When making use of some motors or speed encoders you may want to fantastic tune the gain and response time of the on-board PI Controller in the Simulink Model by modifying the worths of some components on the board. Since case the discussion on this page will help inform your alternatives. A boosted kind of proportional controller provides crucial action. PI Controller in the Simulink Model provide the low level of level of sensitivity had to produce consistent control in addition to the little drift quality of a high level of level of sensitivity instrument. PI Controller in the Simulink Model will get rid of forced oscillations and continuous state error resulting in operation of on-off controller and P controller respectively. PI Controller in the Simulink Model will not improve the speed of response. It can be expected provided that PI controller does not have methods to anticipate precisely what will take place with the error in near future. A PI controller is included in cascaded with the lead controller.
The VGT/EGR control system is designed in Simulink. The controller changes the positions EGRLIFT and VGTPOS of the EGR and VGT valves. The plant model is tested every 0.1 seconds and the control signals EGRLIFT and VGTPOS are revitalized every 0.2 seconds. Without a-priori understanding of an appropriate control structure, initially attempt “blackbox” state-space controllers of different orders. The plant model has 4 states, so attempt a controller of order 4 or less. Here we tune a second-order controller considering that the “SS2” block in the Simulink model has 2 states. Utilize the slTuner user interface to set up the Simulink model for tuning. Mark the block “SS2” as tunable, sign up the areas where to examine margins and loop shapes, and define that linearization and tuning ought to be carried out at the controller tasting rate.
Now utilize systune to tune the state-space controller topic to our control goals. Deal with the stability margins and roll-off target as difficult restraints and aim to finest fulfill the staying goals (soft objectives). Randomize the beginning indicate lower direct exposure to unfavorable regional minima. The state-space controller might be carried out as is, however it is frequently preferable to boil it down to an easier, more familiar structure. To do this, get the tuned controller and examine its frequency action The very first plot recommends that the controller basically acts like a PI controller acting upon REF-Y (the distinction in between the target and real worths of the regulated variables). The 2nd plot recommends that the transfer from determined disruption to controlled variables might be changed by a gain in series with a lag network. Entirely this recommends the following streamlined control structure including a MIMO PI controller with a first-order disruption feedforward.
The PID Controller block output is a weighted amount of the input signal, the essential of the input signal, and the derivative of the input signal. The weights are the proportional, important, and acquired gain criteria. A first-order pole filters the acquired action. In specific, we will pick and tune the gains of a PI controller based on the impact of the gains on the system’s closed-loop poles while accounting for the intrinsic unpredictability in our model. We will develop the controller to accomplish a wanted level of short-term action and will analyze in information the steady-state mistake produced by the resulting closed-loop system, consisting of in the existence of a consistent disruption.
You must select our service to obtain aid with assignment help since we supply:
- – PI Controller In The Simulink Model assignment services.
- – On-time assignment help for trainees 24/7
- – Extensive assignment services in all disciplines.
- – Infinite modifications on demand of trainees.
- – Expert assignment to direct you in ability advancement.
In order for the controllers to work appropriate, controller requires to be tuned correctly. A PI Controller in the Simulink Model is often used in engineering control system. PI controller estimate consists of 2 various constant requirements, Proportional and essential represented by P and I. PI Controller in the Simulink Model design various numerous guidelines standards thought believed for non linear direct. A PI controller is included in cascaded with the lead controller. The very first plot recommends that the controller basically acts like a PI controller acting on REF-Y (the distinction in between the target and real worths of the regulated variables).